Inhaltsverzeichnis
Schaltplan und Aufbau
Stand: 12/24
Varianten
Der spezifische Schaltplan richtet sich nach dem verwendeten Motor. Seine Spannung und Leistung bestimmen die Auswahl des Motorshields. Ich sehe drei sinnvolle Varianten:
| Akku | Motor | Komponenten | |
|---|---|---|---|
| A: | 1S (3,7 - 4,2V) | 3V Motor | D1 mini, HS8833 |
| B: | 2S (7,4 - 8,4V) | 6V Motor | D1 mini, HS8833, Powershield |
| C: | 3S (11,1 - 12,6V) | 12V Motor | D1 mini, AT8870, Powershield |
Bei den Akkus bedeuten die Angaben:
- 1S: Ein-Zellen Lithium-Ionen- oder Lithium-Polymer-Akku (LiIo- bzw. LiPo-Akku)
- 2S: Zwei-Zellen Lithium-Ionen- oder Lithium-Polymer-Akku (LiIo- bzw. LiPo-Akku)
- 3S: Drei-Zellen Lithium-Ionen- oder Lithium-Polymer-Akku (LiIo- bzw. LiPo-Akku)
Für die Varianten B und C ist jeweils ein Powershield (Step-Down-Regler) zur Spannungsreduzierung notwendig.
Bei meinen Modellbauten verwende ich nur die Varianten A und B.
Materialiste
Für den Microrail-Empfänger werden folgende Materialien benötigt:
- 1 Lolin D1 mini
- 1 Lolin Motorshield HS8833 für Varianten A, B oder Lolin Motorshield AT8870 für Variante C
- 1 Lolin DC Powershield für Varianten B, C
- 1 Widerstand 1 MOhm
- 1 Widerstand 560 Ohm als Led-Vorwiderstandard
- 1 Led zur Anzeige des Status
- Kleinteile: Stiftleisten, Kabel und Schrumpfschläuche
Eine gute Vereinfachung ist der Einsatz von fertig konfigurierten LEDs mit Widerstand und Anschlussleitungen. Diese LEDs sind in verschiedenen Größen und Farben bei AliExpress erhältlich. Die von mir getesteten grünen LEDs verbrauchen wenig Strom, leuchten aber trotzdem sehr hell. Für eine Status-LED ist die Helligkeit zu intensiv. Deshalb trage ich auf das transparente Gehäuse eine Schicht dunkler Farbe auf.
Schaltpläne
Im Folgenden präsentiere ich zwei Schaltpläne für die Varianten A und B. Bei Variante C kommt das anderes Motorshield zum Einsatz.
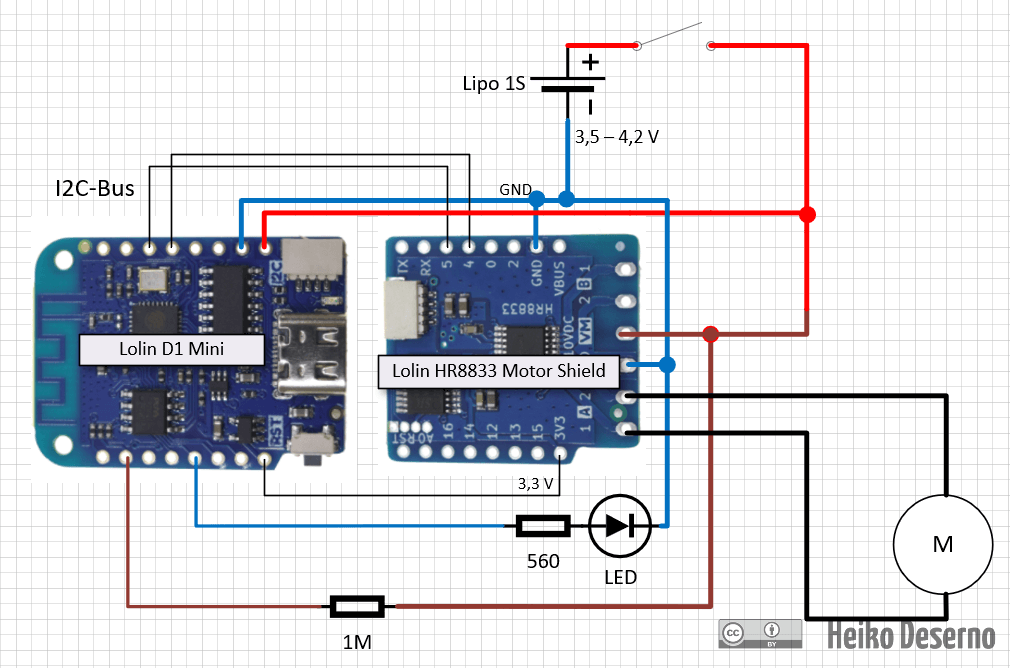
Variante A (eine Akkuzelle)
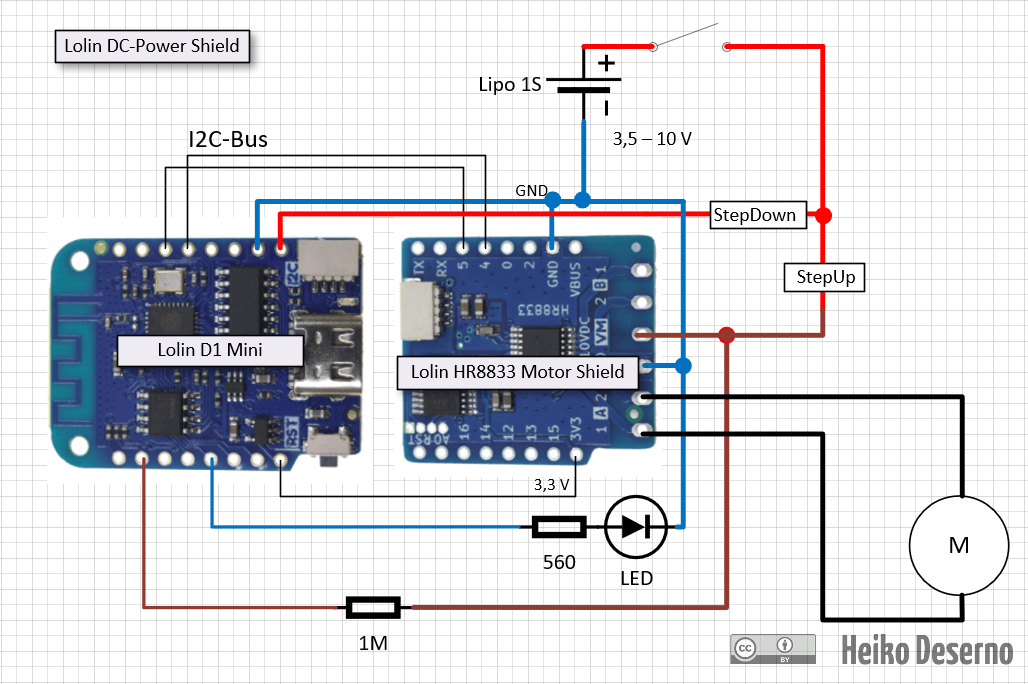
Eine Zelle eines LiIo- oder LiPo-Akkus liefert eine Spannung zwischen 3,5V und 4,2V. Die Spannung verringert sich je nach Ladezustand der Zelle. Der Lolin D1 mini kann mit dieser Spannung direkt betrieben werden. Der Spannungsregler auf dem Microcontroller-Board reduziert die Eingangsspannung auf 3,3V.
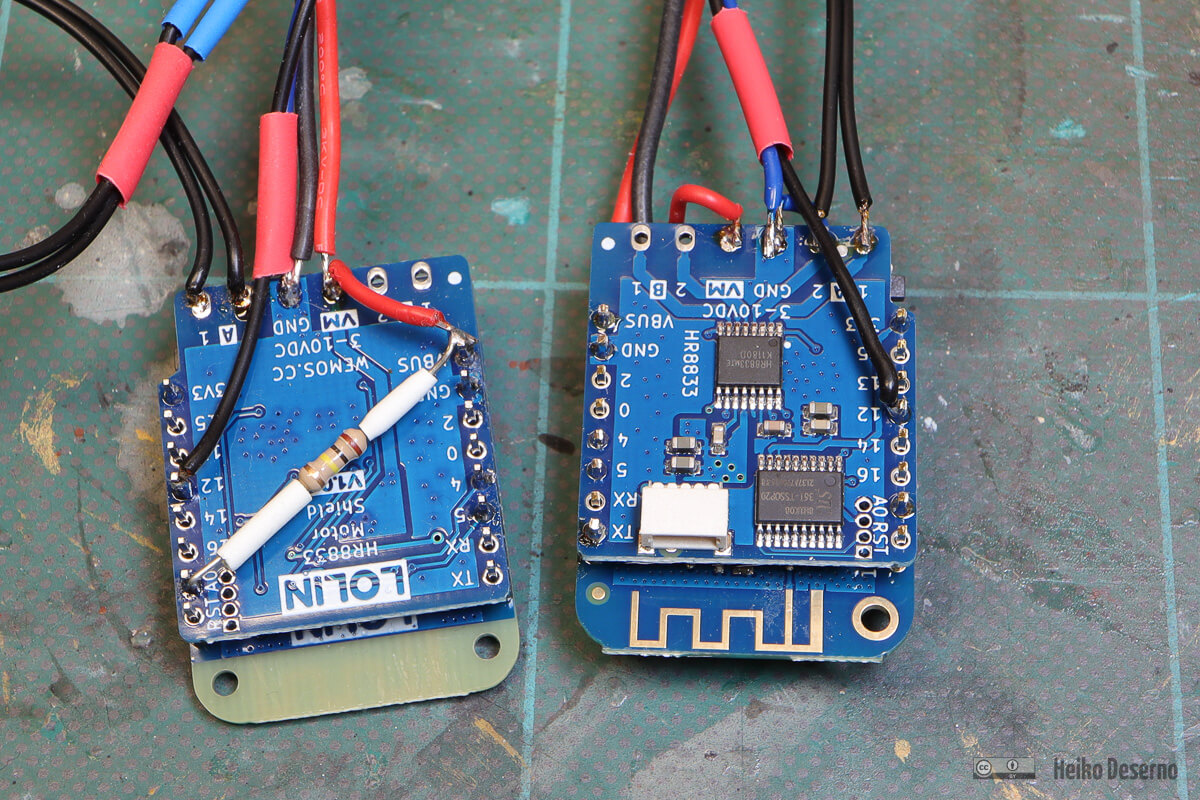
Laut Schaltplan verbindet man die beiden Platinen. Das Motor-Board bietet zwei Motor-Ausgänge, die in der Software parallel geschaltet sind. Neben den beiden Platinen benötigt man nur wenige andere Bauteile. Ein Widerstand mit einer Größe von 1 MOhm dient als Spannungsteiler für den analogen Eingang des Microcontrollers. Er sorgt für die Spannungsmessung der Akkuzelle. In der grafischen Oberfläche wird der Wert angezeigt. Zudem schließt man eine Status-LED mit Vorwiderstand an. Diese kann außen am Fahrzeug sichtbar befestigt werden und zeigt den Betriebsstatus an. Nach der vollständigen Initialisierung des Empfängers leuchtet die LED dauerhaft.
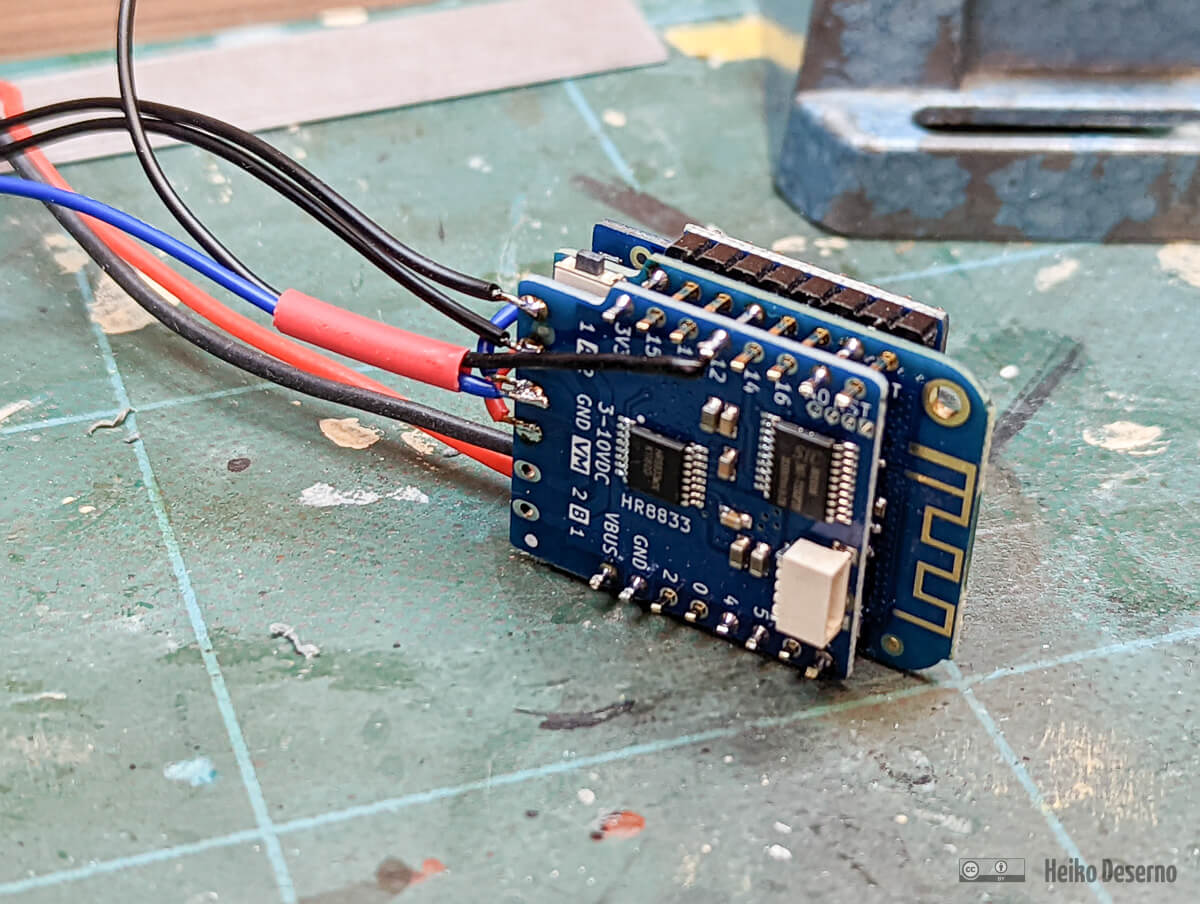
Das Layout der Lolin-Platinen erleichtert den Aufbau erheblich. Man kann sie übereinander platzieren und verbinden. Die entsprechenden Stiftleisten sind im Lieferumfang der Bauteile enthalten. Die Anschlussbelegung bleibt bei allen Platinen gleich. Dies gilt auch, wenn nicht alle Pins auf den Boards angeschlossen sind. Der Zusammenbau beider Platinen ergibt eine Höhe von etwa 12 mm.
Variante B (zwei Akkuzellen)
Zwei Akkuzellen liefern eine Spannung zwischen 7V und 8,4V. Diese Spannungsquelle passt ideal für 6V- oder 9V-Motoren. Da die Eingangsspannung über 5V liegt, muss man die Spannung für den Microcontroller herabregeln. Das Lolin DC Powershield übernimmt diese Aufgabe. Der Step-Down-Regler arbeitet in einem Spannungsbereich von 7 - 24V und bietet 5V Ausgangsspannung. Er behält das gleiche Platinen-Layout wie der D1 mini und das Motor-Shield. So ermöglicht er eine weitere Huckepack-Anordnung.
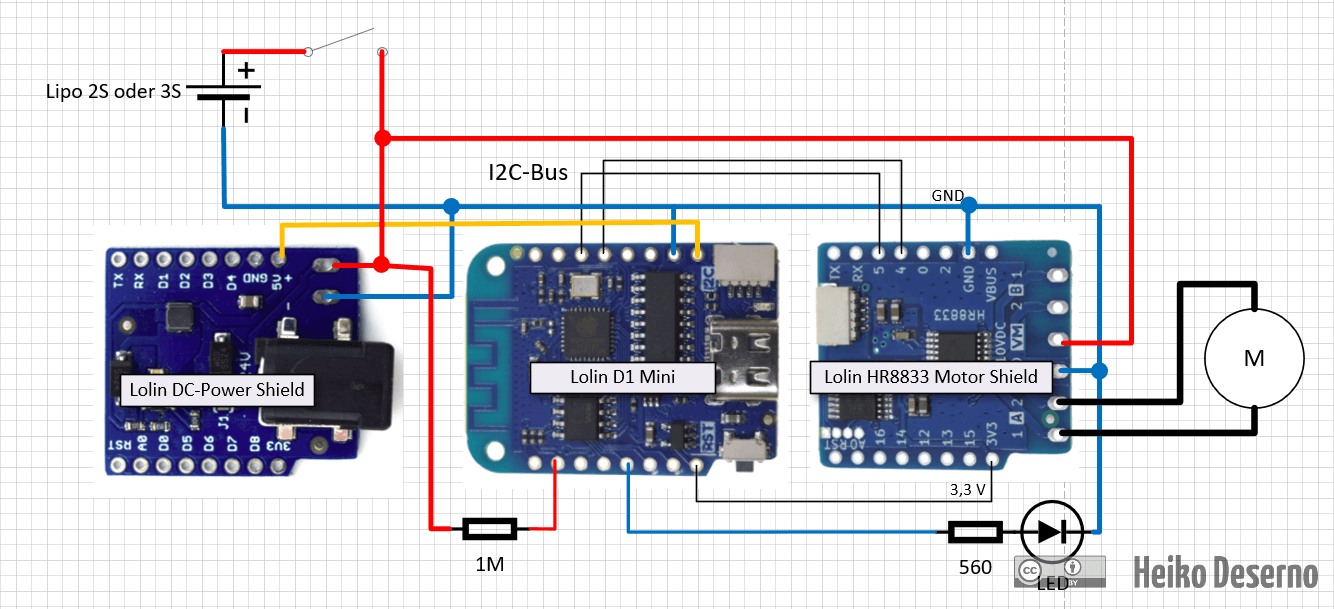
Durch die dritte Platine wächst die Höhe des Bausteins auf 15 mm.
Variante mit anderen Spannungen
Die vorgestellten Konfigurationen mit einer oder zwei Akkuzellen sind nicht die einzigen Varianten. Allgemein braucht man zwei Spannungen, die unterschiedlich sein können. Für den Microcontroller werden 5V benötigt. Das Motor-Board und der Motor können eine andere Spannung verwenden. Je nach verwendeter Eingangsspannung muss man Regler einsetzen.
Ein Beispiel ist die Steuerung eines 12V-Motors, wie er in Modellbahnlokomotiven zu finden ist. Der Empfänger kann mit einer Akkuzelle betrieben werden. Ein Step-Up-Regler erzeugt dabei die für das Motor-Board und den Motor benötigte höhere Spannung. Die Höchstspannung des Motor-Boards muss berücksichtigt werden. Das HR8833-Board erlaubt maximal eine Eingangsspannung von 10V. Für eine 12V-Konfiguration sollte man das AT8870-Board verwenden, welches Eingangsspannungen bis 38V zulässt.
Ein weiteres wichtiges Detail bei Step-Up-Reglern ist, dass sie nicht verlustfrei arbeiten. Der Wirkungsgrad verschlechtert sich bei größerem Spannungsunterschied. Eine sinnvollere Lösung wäre der Einsatz von zwei oder drei Akkuzellen, wodurch der Step-Up-Regler einen geringeren Spannungsunterschied überbrücken muss. Allerdings benötigt man zusätzlich einen Step-Down-Regler, um den Microcontroller zu versorgen.
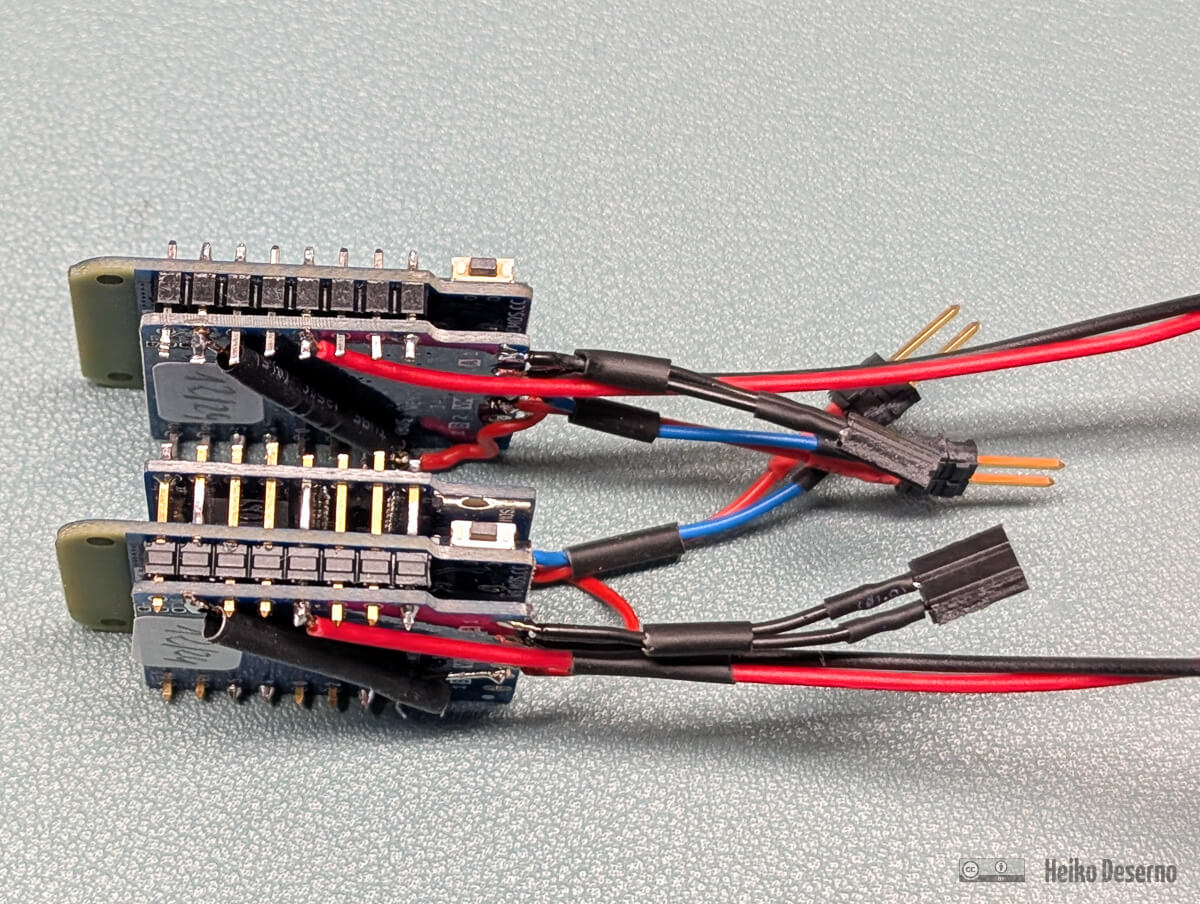
Aufbau
Für Variante A verbindest du beide Platinen mit den beiliegenden Stiftleisten. Das Bild oben zeigt den fertigen Aufbau. Der D1 mini sitzt auf dem Motorshield. In Variante B sind die mitgelieferten Stiftleisten des D1 mini zu kurz. Du musst sie durch längere anderweitig beschaffte Stiftleisten ersetzen. Das Bild unten zeigt den fertigen Aufbau. Der D1 mini sitzt ebenfalls auf dem Motorshield, und darüber liegt das Powershield.